{kind=link}
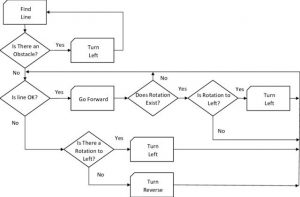
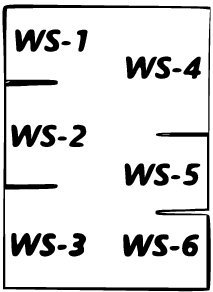
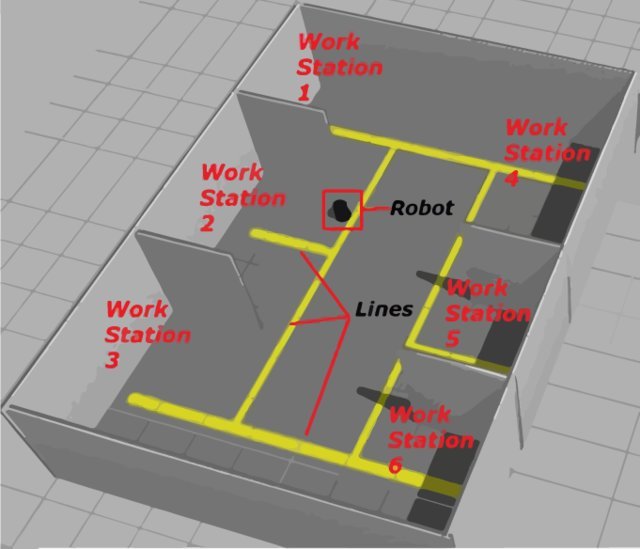
This study is related to SLAM, also known simultaneous localization and mapping which is highly important and an indispensable issue for autonomous mobile robots. Both an environment mapping and an agent’s localization are provided with SLAM systems. However, while performing SLAM for an unknown environment, the robot is navigated by three different ways: a user guidance, random movements on an exploration mode or exploration algorithms. A user guidance or random exploration methods have some drawbacks that a user may not be able to observe the agent or random process may take a long time. In order to answer these problems, it is searched for a new and autonomous exploration algorithm for SLAM systems. In this manner, a new kind of left-orientated autonomous exploration algorithm for SLAM systems has been improved. To show the algorithm effectiveness, a factorylike environment is made up on the ROS (Robot Operating System) platform and navigation of the agent is observed. The result of the study demonstrates that it is possible to perform SLAM autonomously in any similar environment without the need of the user interference.